BeebControl>>Robot arms>>Alfred |
 |
Alfred from Robot City Technology
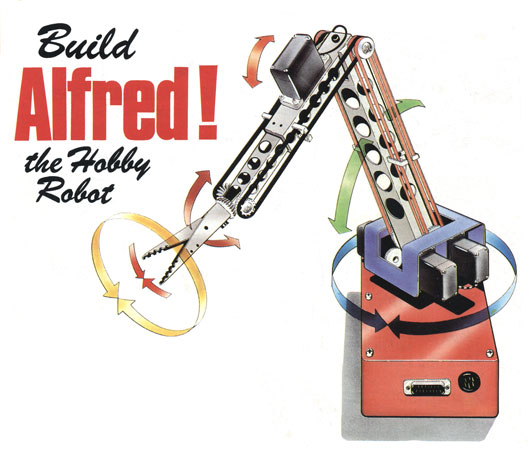
The 'Alfred' arm made its first appearance in a series of constructional articles in Everyday Electronics magazine in late 1984. The articles were written by Alfred's creator, Alan Green. (It seems the Alfred name was a shortened version of 'Alan's friend' - a name Alan Green gave to his home built robot to impress his six year old daughter and her school friends.) The Everyday Electronics DIY version, as illustrated on the left, used six model servos and was designed to be controlled by a BBC B. It housed an array of discrete TTL chips to code and decode 8-bit parallel data signals, with much of the processing work done by the Beeb's CPU. A set of parts was available from Robot City Technology Ltd (RCT), which I presume was Alan Green's own company. Prices were around £160 ready built and £120 in kit form. |
|
A slicker, more commercial version of Alfred had been developed by RCT by 1985/86 and is illustrated below. This later Alfred used essentially the same external casing, servos and toothed belt design, but replaced the original electronics with an 'intelligent' motherboard running an 8MHz Z8681 MCU with separate 2K ram chip and 8K eprom. This allowed it to be driven, potentially, by any micro that could handle a bi-directional serial or parallel data stream - as the Z8 has multiple 8-bit data ports and an on-chip UART for serial comms. RCT's mark I board retained a 34-way IDC plug for parallel data transfer. The later mark II version was fitted with a serial interface instead, for compatibility with a wider range of micros. By this point the prices had risen to £200 for a kit and £270 fully assembled. | 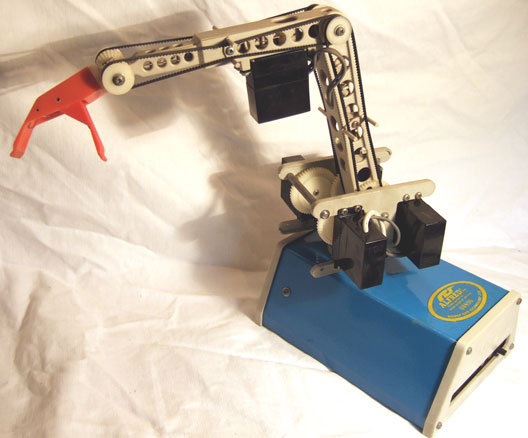 |
Alfred II arrives (and disappears)
In April 1986 RCT announced the introduction of Alfred II, a bigger stronger version of Alfred I at about five times the price. Practical Electronics magazine described it thus:
"Alfred II is selling for around £1,300 and is aimed at higher education but is also strong enough to be used in some light industrial applications. The larger Alfred has a quoted lifting capacity of 2kg, although the makers say it has lifted 3kg, whereas Alfred I can only lift 170gms. Its reach at 580mm is greater than the 380mm of Alfred I, with the waist being able to move through 270 degrees, shoulder through 110 degrees, elbow 135 degrees, wrist pitch 180 degrees and roll 180 degrees. It also has an on-board Z80 based processor which can accept up to 200 steps being entered from a keyboard. In addition, it can be controlled by a BBC B and Spectrum through the serial port. The development of an on-board processor and using a serial rather than a parallel port have been adapted for the Alfred I and the parallel port is being phased out."
RCT claimed to have sent early Alfred II orders out and to be examining overseas markets. So much so that they were considering renaming Alfred - apparently the name conjured up a wife-beating TV character in German-speaking markets. The new export market name for Alfred was to be Pico. It's doubtful that any of these overseas markets were ever penetrated and also that the larger Alfred II ever got past the prototype stage. But if you've seen a Pico I, Pico II or Alfred II please let me know. |
Alfred and Hadenhill Systems Ltd
Through the late eighties and early nineties the Alfred 1 arm with mark II board appeared to be marketed by Hadenhill Systems Ltd (HSL) of Wootton, Bedford. Their leaflet said:
"The Alfred robot system is designed to teach the principles of robotics. It meets the need for a low cost robot for educational use in schools, colleges and industrial training departments. The system is structured to provide on-going education by introducing expansion modules, therefore always updating the system to meet new technology demands. The complexity of exercises that can be carried out will benefit school children who are being introduced to robot technology or technical college students requiring an in-depth understanding of industrial robots. Alfred can also provide stimulating activities of therapeutic value for disabled people."
|
 |
Alfred and the 'Automated Robot Controller (A.R.C.)'
My copy of the HSL leaflet shown on the left was bound into a manual and accompanied by software for the Acorn Archimedes (RISC OS), written by Phill Kent of Aietos Software in 1990. So the Alfred arm was still alive and kicking in education circles in the early nineties.
As you can see, turntable and conveyor belt accessories were also available. These could be connected to Alfred's two external axes and controlled from the host computer. In this way a simple work cell could be constructed and routines programmed accordingly.
Hadenhill Systems appear to have gone out of business some years ago.
|
<< Arms All content on this website is © Neil Fazakerley or its originators |
|