Post Lab 2
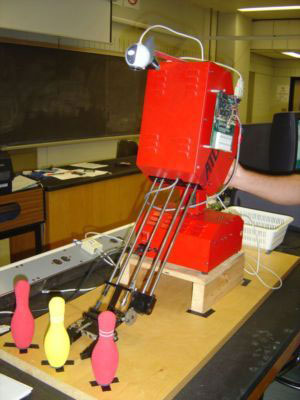
The above picture is of ATLAS robot arm with modified controls. The above robot arm has three degrees of freedoms. These three degrees of freedom are vertical pivot, rotational pivot, and the grip of the claw. The degrees of freedoms are controlled by stepper motors interfaced to a 68HC11 micro-controller. The robot arm has the capability of vertical motion extending from 20 degrees up to 45 degrees down, thus giving it a total 65 degrees of vertical motion. Furthermore it has rotational pivot that is approximately a little larger than 360 degrees. Finally for the third freedom, the grip has the capability of opening approximately 3 inches and closing fully.
The robot arm is controller through RS232 communication. Every motion is controller by sending special commands to the 68HC11. The basic format of the commands is as follows first your reference the motor then the spedd and then the direction.
A challenge or competition is taking place using the ATLAS robot arm. Where one pics up essential 3 pins one at a time and places in the basket to win. From the above picture one can get a good picture of the difficulty this presents. All the actions of the arm will be controlled by a web interfaced design by ourselves with support from our teamates.
Team Mexicano's Plan of Action
Out team has decided to develop a database of the commands we will issue during practices sessions. We will only keep in the database the successful attempts. For the competitons will start our robot using the database alone and will only interrupt to start the next process, or if an attempt has a total failure. Hopefully this will win us the competiton.