BeebControl>>Robot arms>>Cyber 310 |
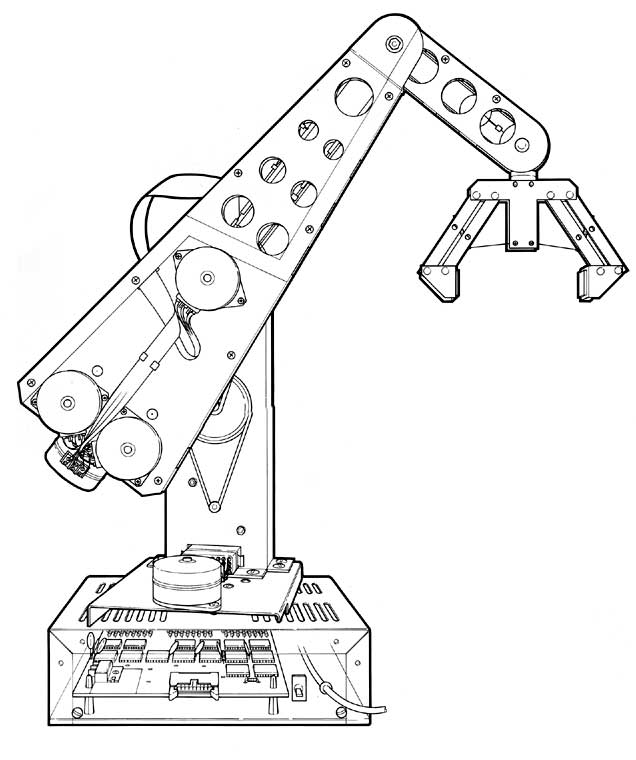 |
The Cyber 310 robot arm
The Cyber 310 was made by Cyber Robotics of Cambridge and cost £650 plus VAT, in July 1984. By comparison, an Armdroid 1 cost £320.
The extra money bought you a bigger and heavier arm with a correspondingly improved specification. Although it appeared to use the same stepper motors as the Armdroid, David Sands, who wrote ROBOFORTH for the Cyber arm and led the team that designed it, tells me they opted for low resistance, low inductance, higher priced versions. This allowed more powerful drivers to be employed and resulted in double the speed of operation as well as increased lift capacity.
|
While the Cyber 310 still employed the relatively vulnerable wire-over-pulley drive system, it was a definite improvement on the Armdroid I's cord driven system. A further important advantage of the Cyber's design from the user's point of view was that its stepper drive signals were generated internally, giving it the potential for computer-free control via an external pendant (see my pendant design on the 'Electrics' page).
The Cyber 310 acquired a much extended life when it was adopted in 1987 as the basis for the 'Handy 1', a robotic helper for the severely disabled. Its developer, Mike Topping, has since evolved Mk2 versions. In its final form it is totally enclosed and hardly recogniseable as the Cyber 310 (see gallery pages). |
Unfortunately I don't have much detailed information on the original Cyber 310 (e.g. manual, software etc) so if you happen to possess a manual or software I could certainly make use of them.
Pictured right is an early prototype for a Cyber 310 work cell - a design developed by the arm's Dutch importers. Constructed entirely of clear perspex, the three stepper motors were driven by an ex-Cyber 310 circuit board. |
 |
Now available - a DIY control-pendant design for the Cyber 310
I've finished constructing my control pendant design which has been tested 'in the field' at a number of computer shows, so now the arm can be operated as a free standing unit without all the attendant hassle of sourcing a suitable computer and software. I've added some design notes and a schematic to the Electrics>>Pendant page and I'll add further detail as soon as I can get it sketched/scanned for online. In the meantime, take a look at this very interesting Lithuanian site where students have been running two Cyber 310 arms as part of a course project. You'll need to brush up on your eastern European language skills, but I think their diagram of a single stepping control board is almost self-explanatory. |
 |
|
Also worth a visit is this French site for the Hektor HRX, a Forth-based micro. The site confirms that the Cyber 310 was latterly offered as an official accessory for the Hektor computer, with ROBOFORTH supplied as the operating program. There's a connector pin-out and some nice pics there too, but note that the pinout diagram appears to be specific to the Hektor micro. |
<< ArmsAll content on this website is © Neil Fazakerley or its originators |
|