 |
BeebControl>>Robot arms>>Genesis/Feedback |
| Arms | Genesis/Feedback | Models | Electrics |
| This section covers the Genesis P101, P102, S101 and M101 hydraulic robot arms from Powertran Cybernetics, and the HRA933 and HRA934 branded versions from parent company Feedback Instruments | |
 |
It seems logical to treat all these models as one family. They were centred around the same basic design, with small but significant differences in power and capability. Branding aside, the Genesis P101 and Feedback HRA933 were identical twins, as were the P102 and HRA934. The 'HRA' stood for 'Hydraulic Robot Arm' of course. The Genesis models were available in kit form from Powertran Cybernetics, while Feedback Instruments sold only finished-built versions. The Genesis S101 was a simpler version of the P101, using cyclindrical co-ordinates and without articulated joints. The M101 was a mobile derivative of the S101, developed to accompany a series of articles in an early eighties hobby magazine. As far as I know, neither of these models was marketed by Feedback. Incidentally, Feedback Instruments are still in existence and their current range includes three robot arms of more conventional design - the Mentor, Griffin and Serpent (see the Mentor page). |
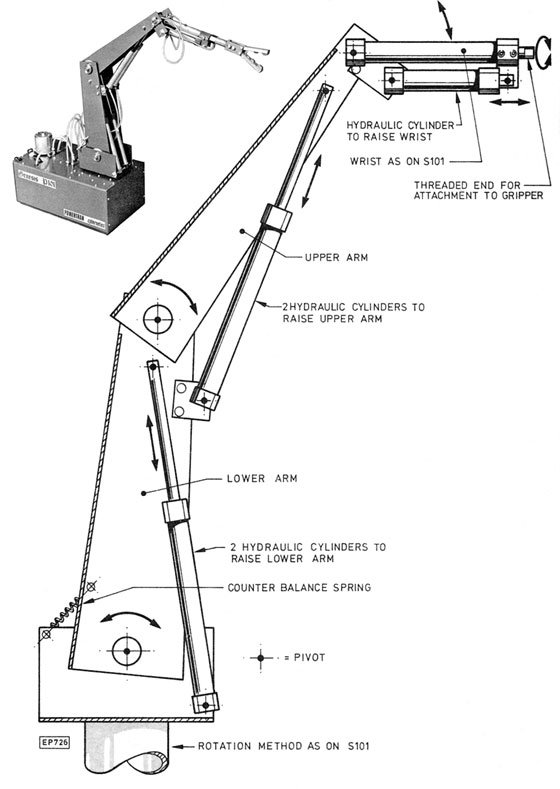
| Arms designed by an admirer of hydraulics The Genesis/Feedback arms were designed by Richard (Dick) Becker in 1981 and were aimed at colleges and universities running computer technology and engineering courses. Dick Becker was later to produce the rather larger Neptune water-powered hydraulic arm when he relaunched his company as Cybernetic Applications in 1985 (see the Neptune page). His 1981 designs concentrated entirely on using a hydraulic pump to generate movement via long-travel rams, so it's not surprising there's the hint of a 'backhoe' digger about the final result. In fact if you replaced the grippers with a scale-sized excavator bucket, you'd have a digger arm in miniature. |
 |
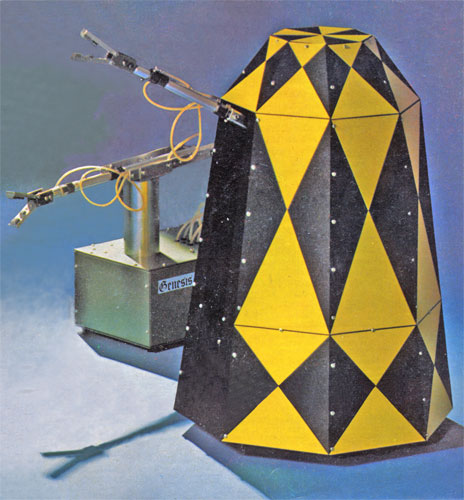 |
A DIY robot arm, based on Genesis The arms incorporated twin rams from waist to shoulder and from shoulder to elbow, with single rams for elbow to wrist, wrist rotation and extension, plus gripper operation. On the HRA933/P101 model, the rams were single acting; return action was provided by gravity and by spring tension for waist (clockwise) and gripper opening. On the HRA934/P102 model the rams were double acting and only the gripper retained sprung return. The mechanical design of the P101 and the simpler S101 arm were used as the basis for a series of articles in a 1980s hobby magazine. The text described the construction of arms from the Genesis range, including this wacky, Dalek-like wheeled robot arm, designated the M101 (M for mobile). The articles were written by one Richard Becker, who was of course the arms' designer. |
| The article noted that a complete kit of parts for the M101 robot was available from Powertran Cybernetics, Portway Industrial Estate, Andover. I wonder if any were ever made - and if so have any survived? | |
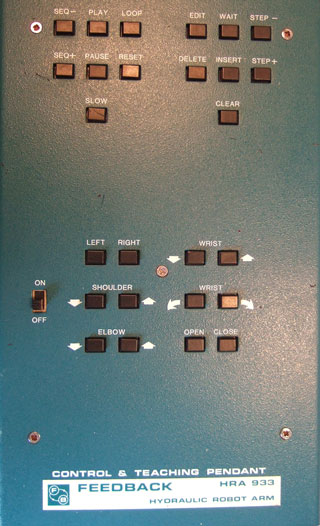
| Control via teach pendant, parallel port and RS232 Each arm was accompanied by a large, bright blue control box housing a 6802 processor board and offering both a parallel and RS232 interface. In theory, the parallel port could be interfaced to almost any micro to provide control input - given suitable software - but in most cases an intermediate interface had to be provided. The non-standard parallel port (which the manufacturers referred to as a MICA port) also allowed an external micro to interrogate the arm's position sensor data so that proper closed-loop control could be implemented. The RS232 serial interface was more nearly universal but unfortunately accepted only simple stop/go commands. Connection between arm and control box was by two multi-way sleeved cables, hard-wired at the arm end but with 20-pin sockets at the control box end. A teach pendant (see right) was also supplied for driving the arm in real time and for entering sequences of moves into memory for later playback. The arm itself contained no intelligent electronics and was finished with a bluish-grey 'hammer' coat. |
 |
<< Arms homeAll content on this website is © Neil Fazakerley or its originators |