 |
BeebControl>>Robot arms>>Mentor |
| Arms | Mentor | Gallery |
 |
Mentor: a grown up Micro Grasp In its earliest form, Mentor was clearly an enlarged, meatier version of Powertran's Micro Grasp. Richard Becker, Micro Grasp's designer, had just left Powertran to set up his own company - Cybernetic Applications - and Mentor and Neptune were the first results. Mentor used the same motor/gearbox combinations as Micro Grasp, but featured a memory mapped interface for direct connection to the BBC micro's 1MHz bus as well as versions for the Commodore VIC20 and Spectrum. |
|
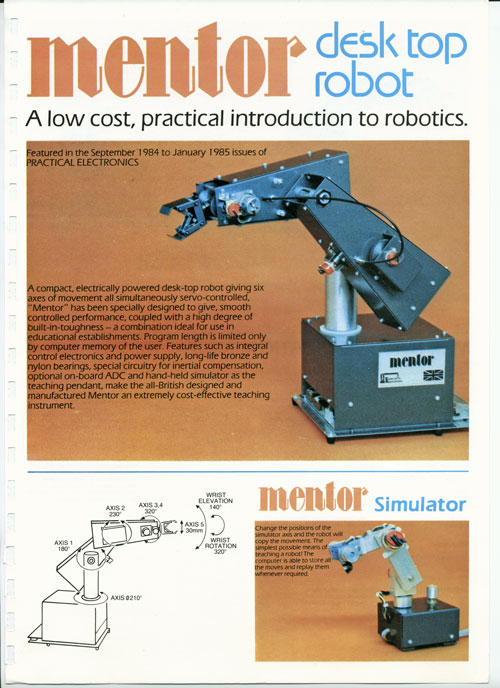
On the right is a scan of the launch publicity sheet, which was bound as part of a reprint of articles originally published in Practical Electronics magazine. The Mentor it features is the early short-box version, where the PCB projects a couple of inches beyond the rear of the casing. Perhaps the pcb turned out longer than expected after the case had been prototyped. Later models all featured a longer base box which covered the pcb more completely and also included a variety of 4mm sockets on the rear face for control and monitoring of external devices such as work-cell components. The early 8-bit micro compatible motherboard was eventually superceded by a PC-centic board with a choice of parallel or serial bus interfaces. The board could be populated for either interface, but not both. It also required the fitting of a proprietory ISA card at the PC end. Cybernetic's range of products were later absorbed into the Feedback Instruments range and Mentor continued there until recent years, albeit with all its 'dangerous' (but interesting) open mechanisms closed off and incorporating a USB driven interface. |
 |
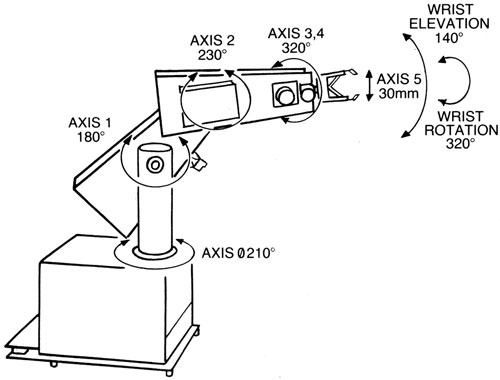
| The basic mechanics remained the same, however, with geared down DC motors driving all axes (including the gripper), each monitored by a potentiometer feeding back a signal for precise positional control. A feature of all the Cybernetic arms was a miniature control 'simulator' arm, provided as an alternative to direct computer positioning. When moved by hand, the simulator fed back positional voltage readings to the controlling computer and these could be used either to move the Mentor's motors to matching positions or recorded as path data for future use. | |
<< ArmsAll content on this website is © Neil Fazakerley or its originators |